本文件介紹了編碼器理論、量測編碼器的基礎知識以及使用NI硬體量測編碼器的選項。
編碼器和應用概述
編碼器是一種可以量測運動或位置的機電設備。大多數編碼器使用光學傳感器以脈衝串的形式提供電信號,而這些電信號又可以轉化為運動、方向或位置。
旋轉編碼器用於量測軸的旋轉運動。圖1顯示了旋轉編碼器的基本組件,它由LED、圓盤和位於圓盤另一側的光檢測器組成。安裝在旋轉軸上的磁盤具有編碼到磁盤中的不透明和透明扇區的圖案。當圓盤旋轉時,不透明的部分會阻擋光線,而在玻璃透明的地方,光線可以通過。這會產生方波脈衝,然後可以將其解釋為位置或運動。
編碼器通常每轉有100到6,000個段。這意味著這些編碼器可以為100段編碼器提供3.6度的分辨率,為6,000段編碼器提供0.06度的分辨率。
線性編碼器的工作原理與旋轉編碼器相同,不同之處在於它不是一個旋轉盤,而是一個固定的不透明條帶,其表面有透明狹縫,並且LED檢測器組件連接到移動體上。
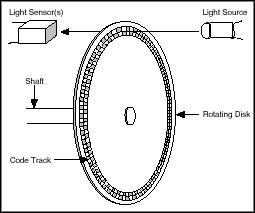 圖1
圖1 光學編碼器組件
具有一組脈衝的編碼器將沒有用,因為它無法指示旋轉方向。使用相位相差90度的兩個代碼軌道 (圖2),正交編碼器的兩個輸出通道指示旋轉的位置和方向。例如,如果A超前B,則圓盤按順時針方向旋轉。如果B超前A,則圓盤以逆時針方向旋轉。因此,通過監測脈衝數和信號A和B的相對相位,您可以跟踪旋轉的位置和方向。
 圖2
圖2 正交編碼器 A 和 B 輸出信號
此外,一些正交編碼器包括第三個輸出通道 (稱為零或參考信號) 每轉提供一個脈衝。您可以使用這個單脈衝來精確確定參考位置。在大多數編碼器中,此信號稱為Z端子或索引。
到目前為止,本文件僅涉及所謂的單端增量正交編碼器。這些被稱為單端,因為A和B信號都以地為參考,因此每個信號有一根導線 (或一端)。另一種常用的編碼器類型是差分編碼器,其中每個A和B信號有兩條線。A信號的兩條線是A'和A,B信號的兩條線是B'和B。這種配置也稱為push-pull,因為所有四條線始終提供已知電壓(0 Vcc)。當A為Vcc時,A'為0 V,當A為0 V時,A'為Vcc。在單端編碼器的情況下,A 要麼是Vcc,要麼是浮動的。差分編碼器通常用於有干擾的環境,因為進行差分量測可以保護信號的完整性。
使用增量編碼器,您只能量測位置變化 (從中可以確定速度和加速度),但無法確定物體的絕對位置。第三種編碼器,稱為絕對編碼器,能夠確定物體的絕對位置。這種類型的編碼器像增量編碼器一樣具有交替的不透明和透明段,但是絕對編碼器使用多組段在編碼器輪上形成同心圓,就像目標或飛鏢上的靶心一樣。同心圓從編碼器輪的中間開始,隨著環向環外側伸出,它們的段數是前一個內環的兩倍。第一個環,也就是最裡面的環,有一個透明和一個不透明的部分。從中間向外的第二個環有兩個透明段和兩個不透明段,第三個環每個段有四個。如果編碼器有10個環,它的最外環有512個段,如果它有16個環,最外環有32,767個段。
因為絕對編碼器的每個環的段數是前一個環的兩倍,所以這些值形成二進制計數的數字。在這種類型的編碼器中,編碼器輪上的每個環都有一個光源和接收器。這意味著10環的編碼器有10組光源和接收器,16環的編碼器有16個光源和接收器。
絕對編碼器的優點是您可以將其減速,以便編碼器輪在機器的整個行程中轉一圈。如果機器行程長度為10英寸,並且其編碼器具有16位分辨率,則機器的分辨率為10/65,536,即0.00015英寸。如果機器行程較長,例如6英尺,旋轉變壓器可以跟踪每英尺的行程,第二個稱為精細旋轉變壓器的旋轉變壓器可以跟踪1英尺內的位置。這意味著您可以對粗編碼器進行齒輪傳動,使其在整個6英尺距離和齒輪上旋轉一圈精細編碼器,使其整個分辨率分佈在1英尺 (12英寸) 範圍內。