1. 创建LabVIEW项目并在网络中添加实时PXI控制器。
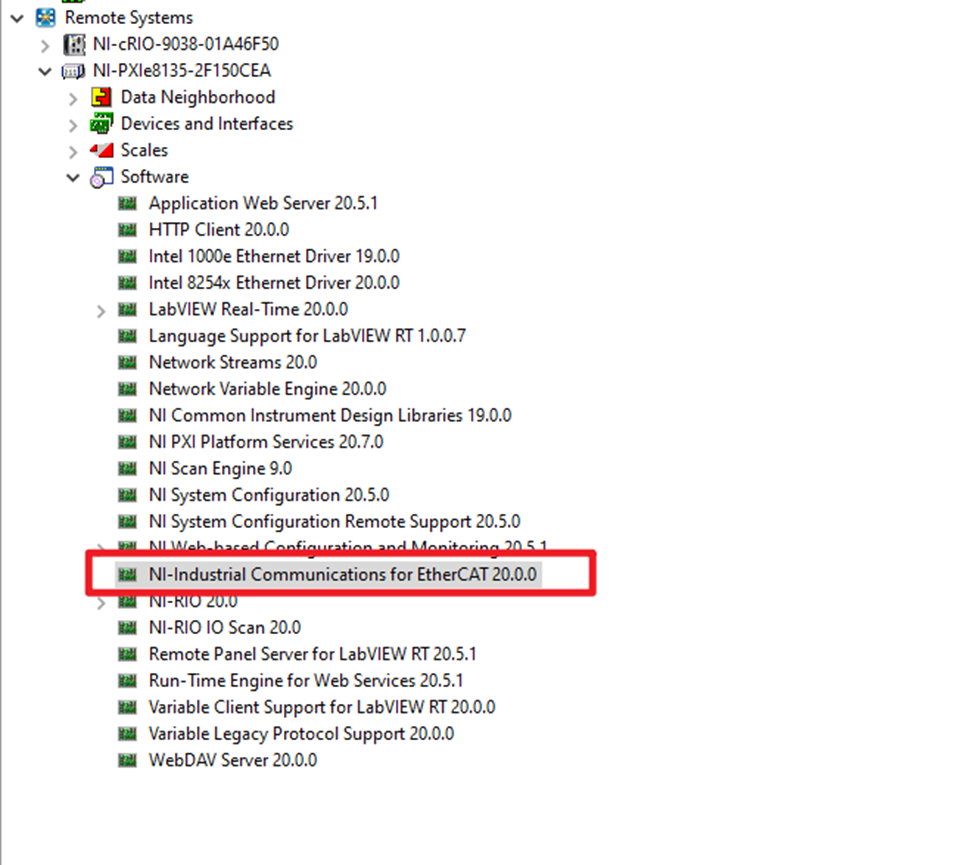
2. 确保
NI-Industrial Communications for EtherCAT驱动程序已正确安装在PXI RT控制器中。
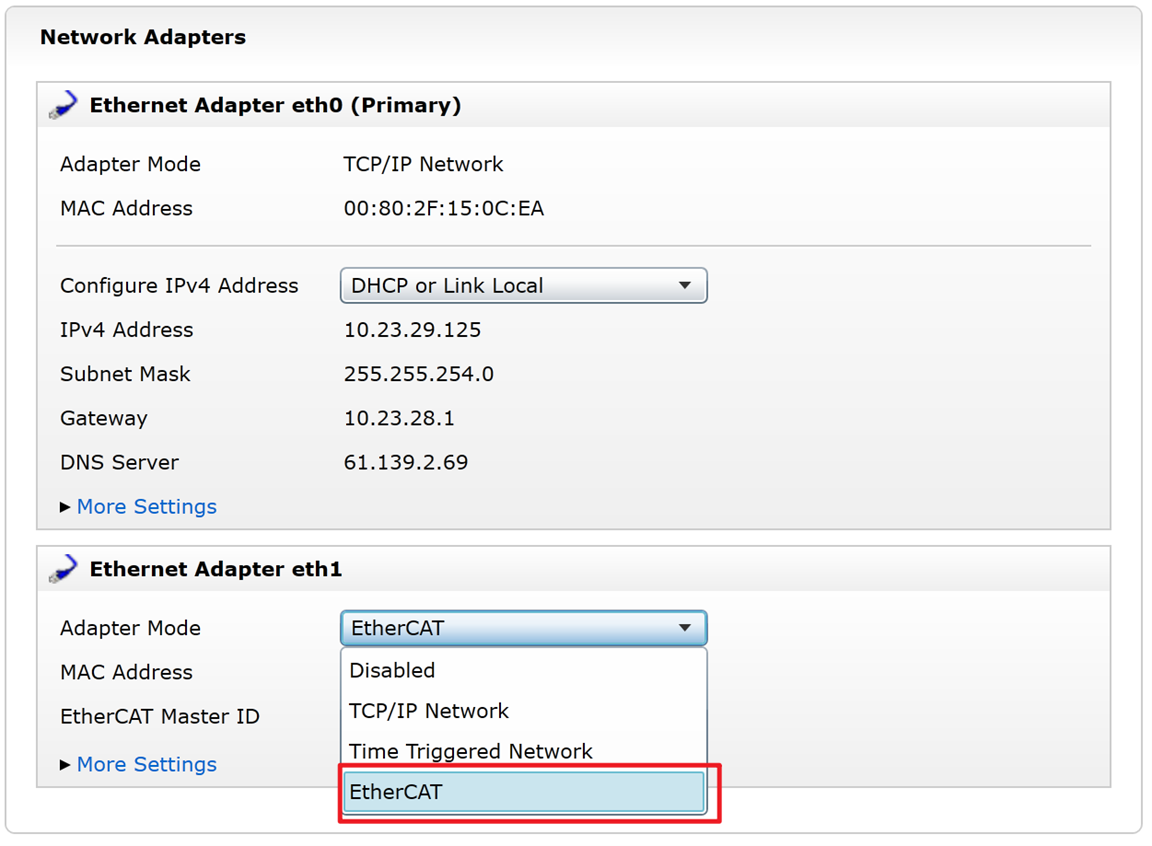
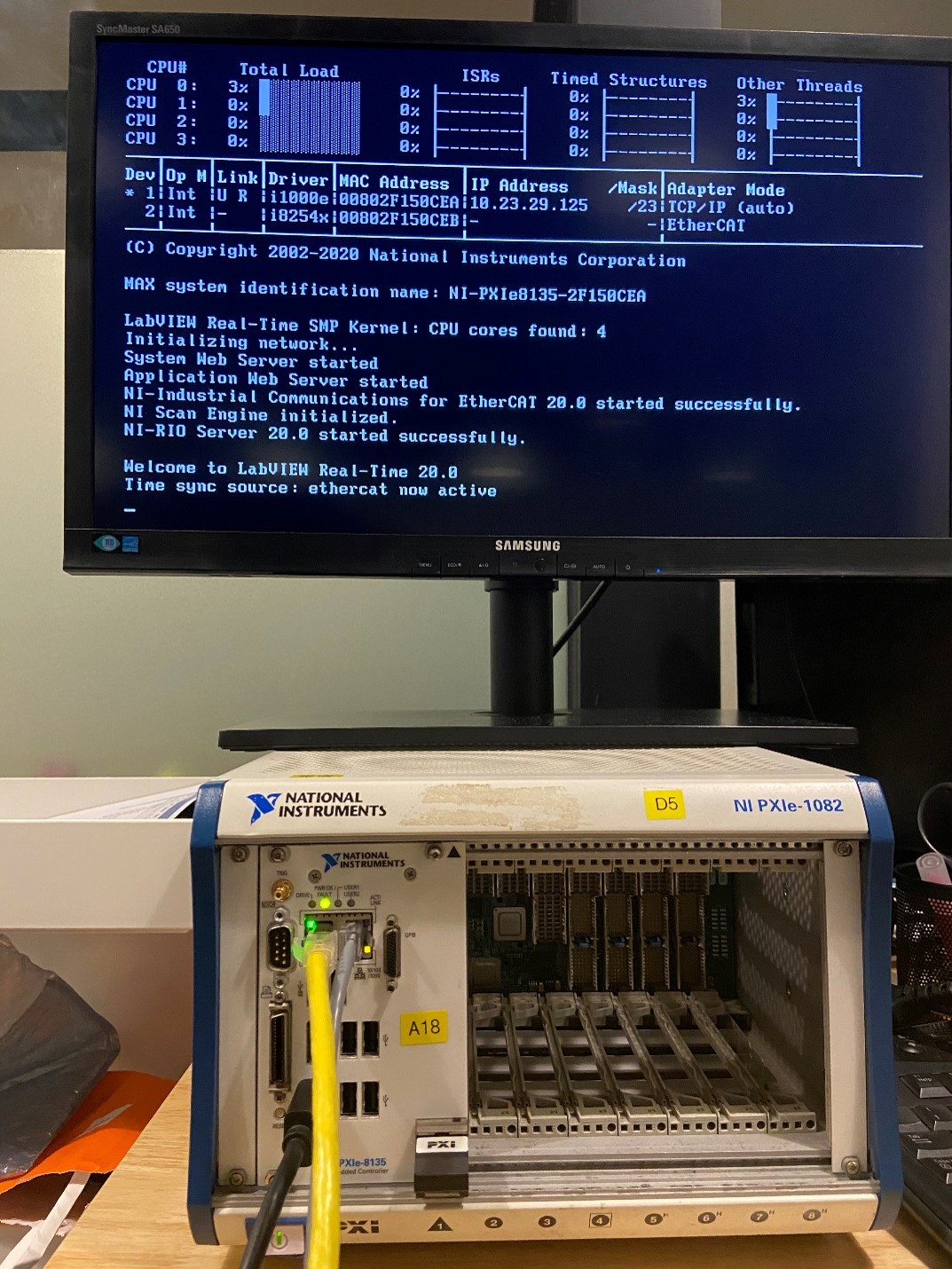
3. 在NI MAX中,将PXI控制器以太网适配器eth1配置为“EtherCAT”适配器模式。如果找不到EtherCAT选项,则需要检查驱动程序版本或软件环境是否正确安装。
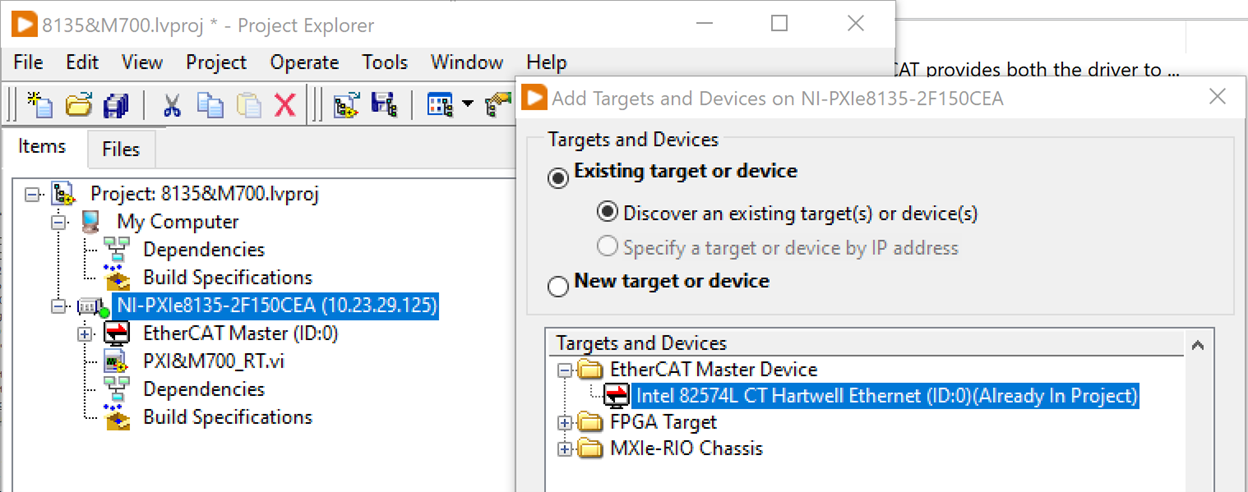
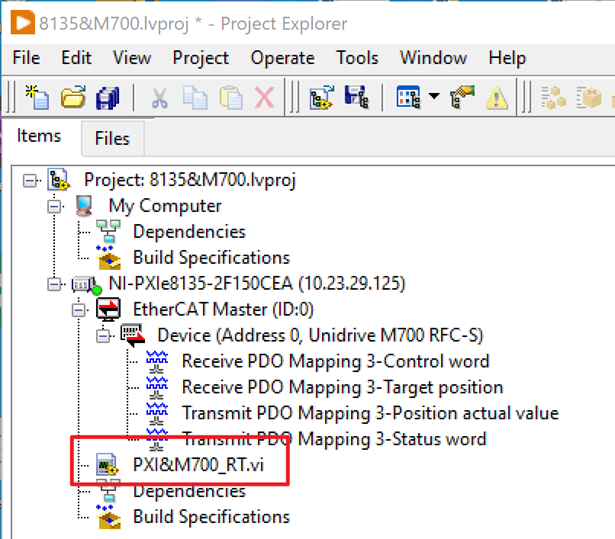
4. 将您的
PXI EtherCAT接口资源添加到您的项目中。(在本例中为Intel 82574L)
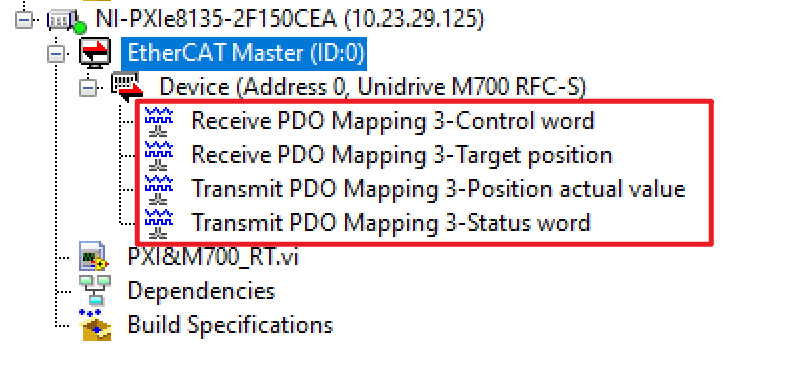
5. 将Nidec Unidrive M700 XML文件(驱动器厂商提供,需与驱动器/EtherCAT通讯模块固件一致,请与驱动器供应商确认)导入NI LabVIEW。
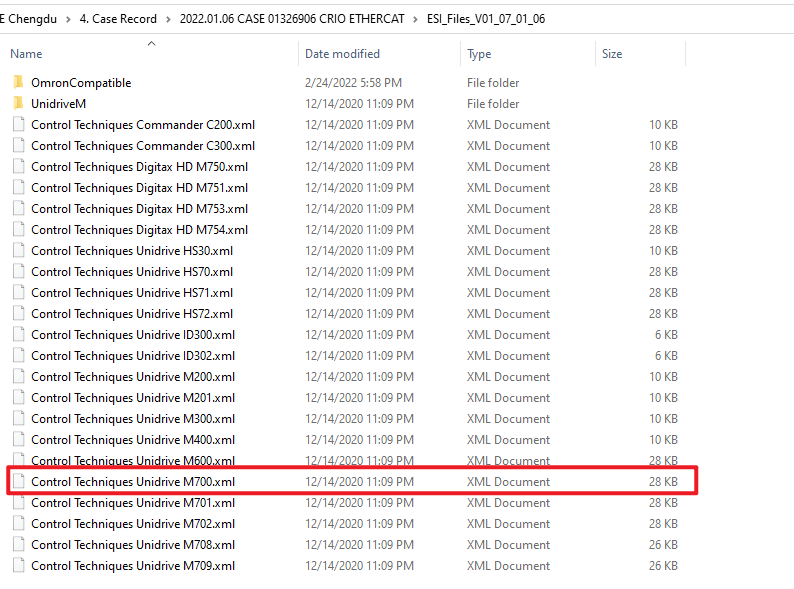
注意:不要重命名xml文件,这可能会导致未知错误。
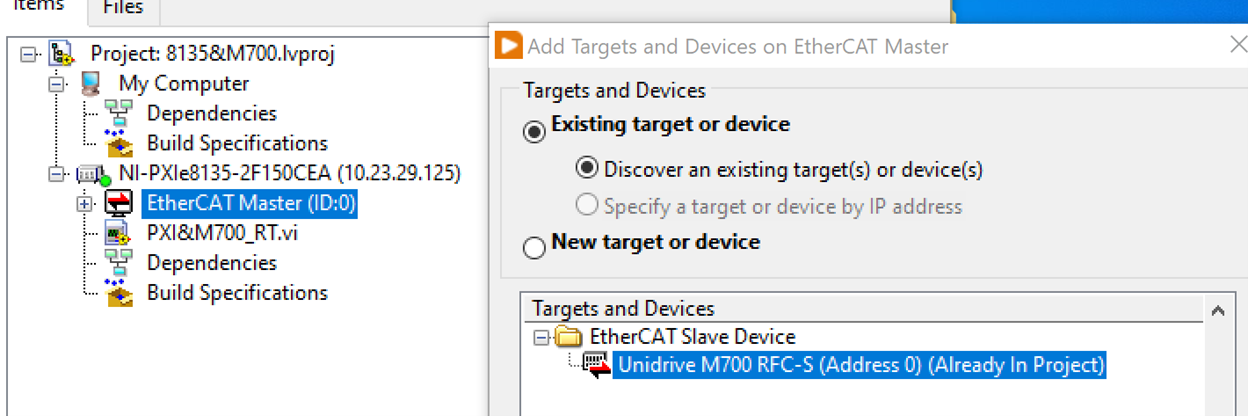
导入成功后,LabVIEW现在可以检测到连接到PXI控制器的现有EtherCAT从设备,并自动导入xml文件里开放的IO以供后续使用。
如果要在LabVIEW中修改开放的IO变量,需要修改XML文件,请咨询驱动器供应商的专家,否则不建议这样做,参考
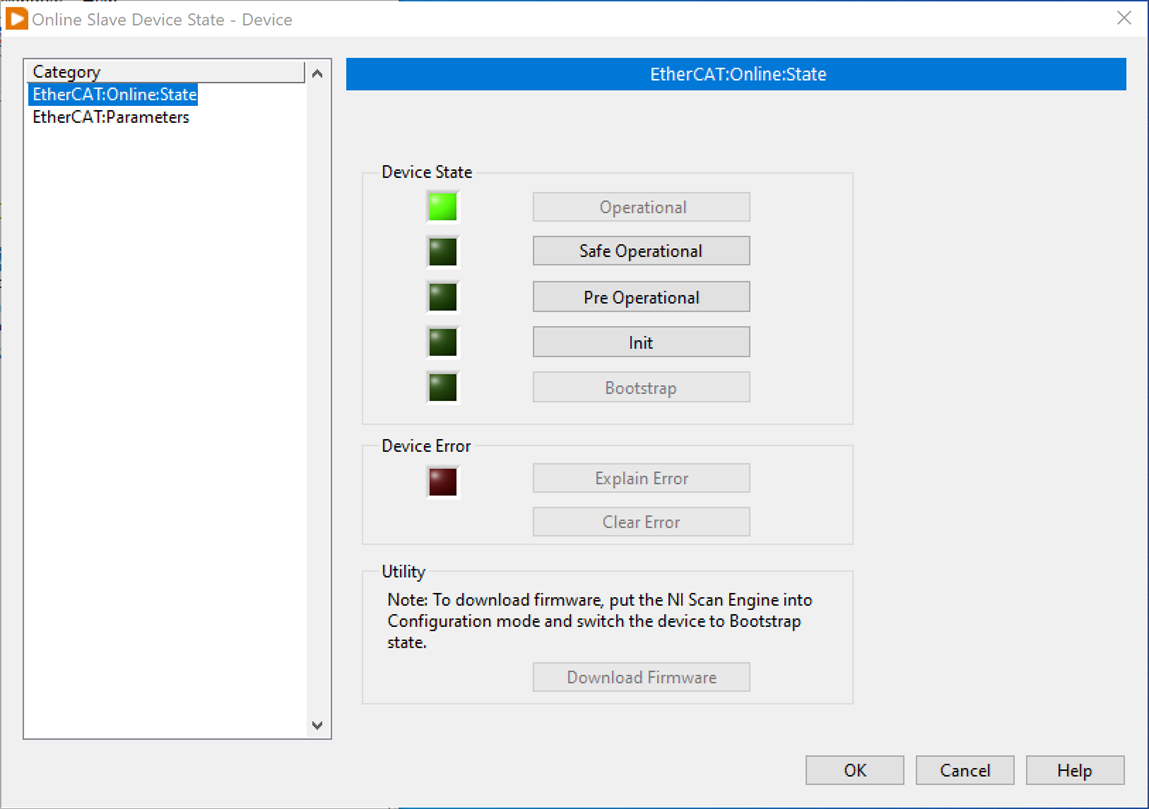
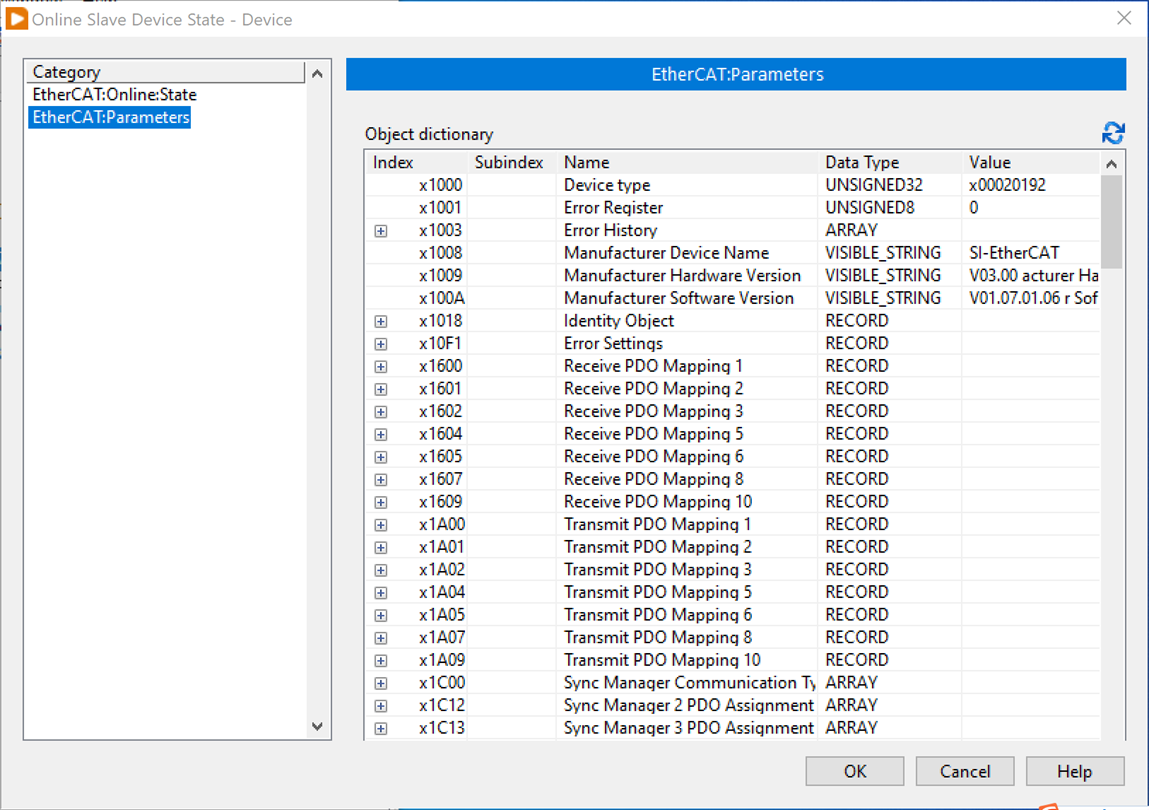
Change PDO Mappings for a Third Party EtherCAT XML File6. 要查找EtherCAT从设备(驱动器)的
Online state and parameters,右键单击LabVIEW项目中的从设备并选择“
Online Slave Device State”。
正常通讯时,以太网网口的绿灯会持续
闪烁。绿灯常亮表示连接成功,但未建立数据通讯。

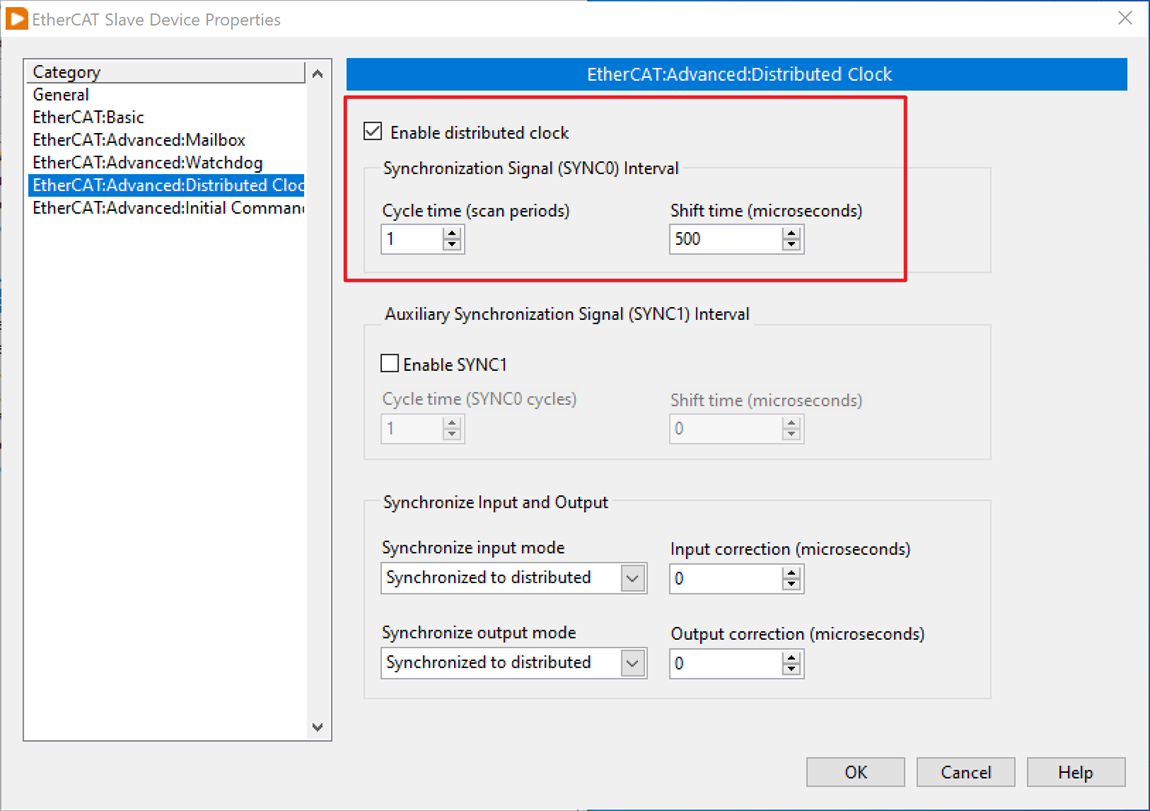
7. 将EtherCAT从设备的
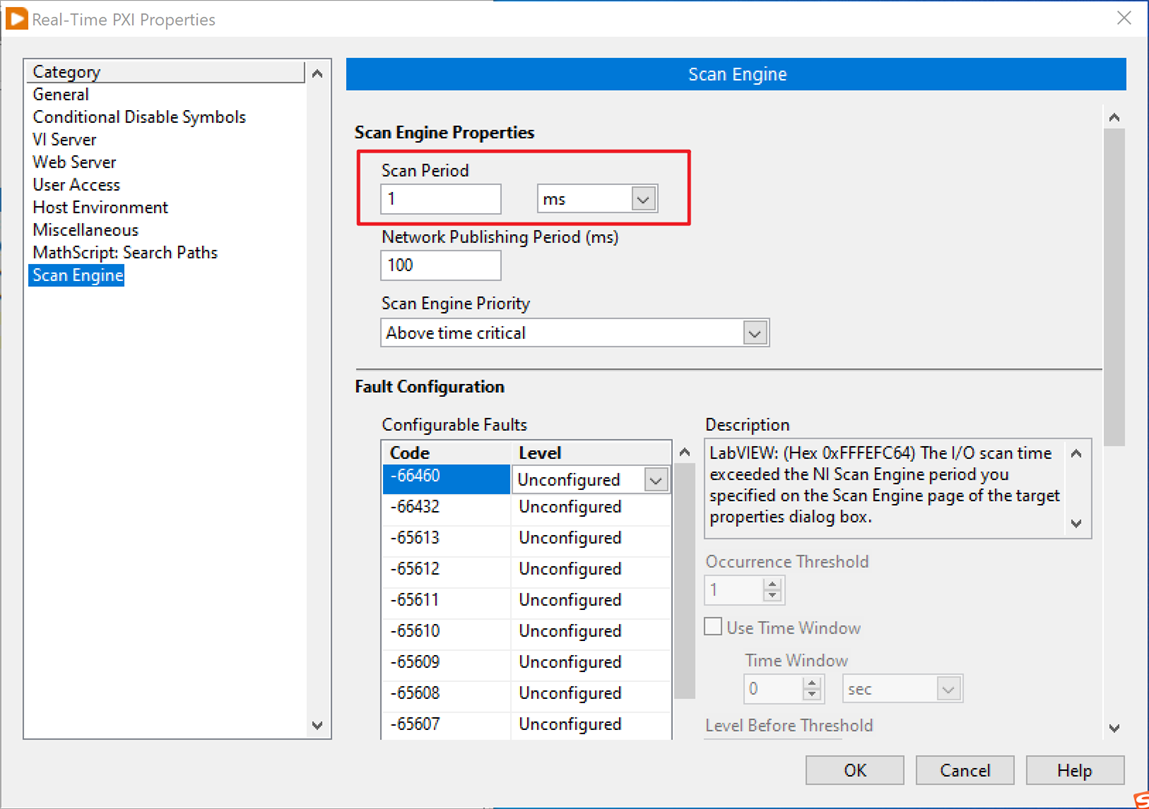
Distributed Clock配置为与
NI Scan Engine period相同,本例中1ms为Scan Engine的周期。启用分布式时钟并将
Shift Time设置为扫描周期的一半。
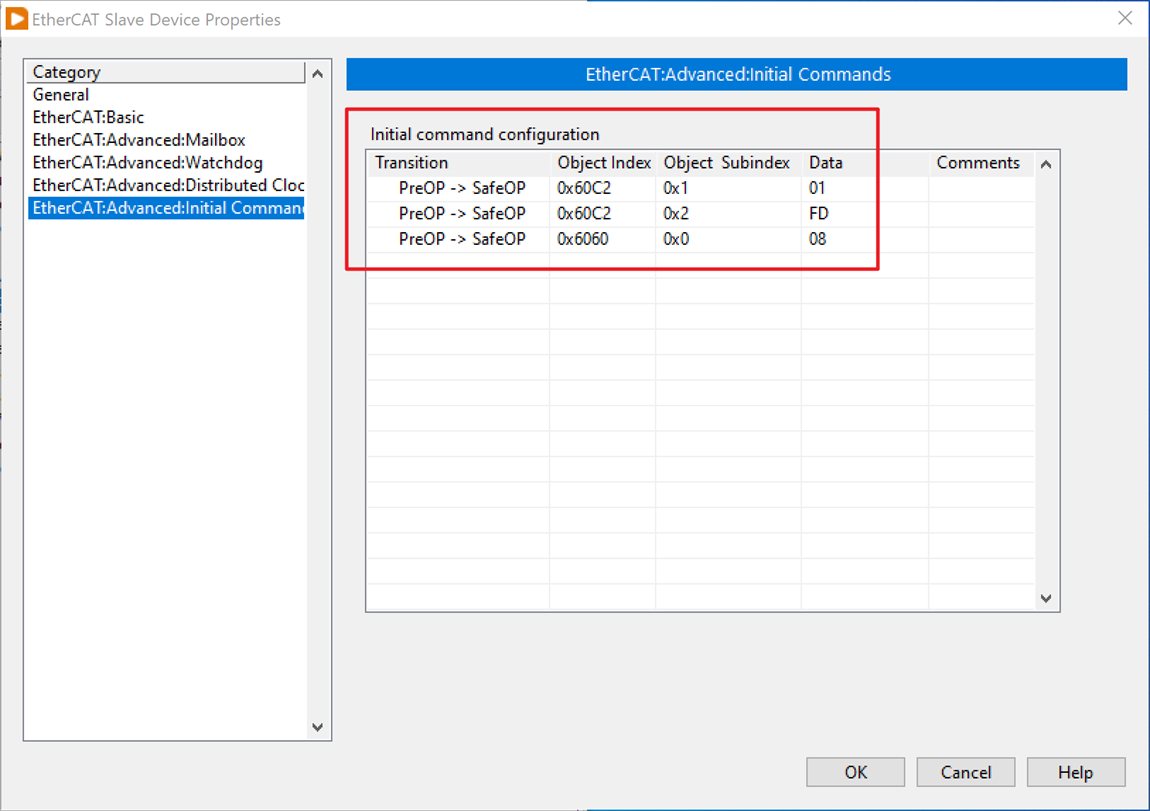
8. 为从设备配置一些
Initial Commands data,以确保它在pre-operational状态下按预期工作。这种情况下,需要配置0x60C2,subindex 0x1为01,0x2为FD。不同的硬件有不同的配置要求,具体信息请咨询您的驱动器供应商。
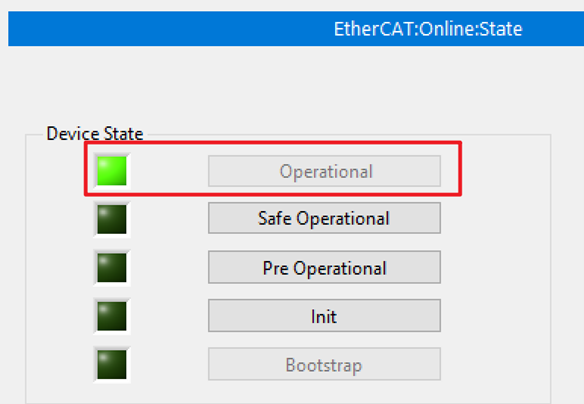
9. 在运行您的VI代码之前,将扫描引擎从配置模式切换到
Active Mode,并检查EtherCAT从站是否已成功进入
Operational状态。
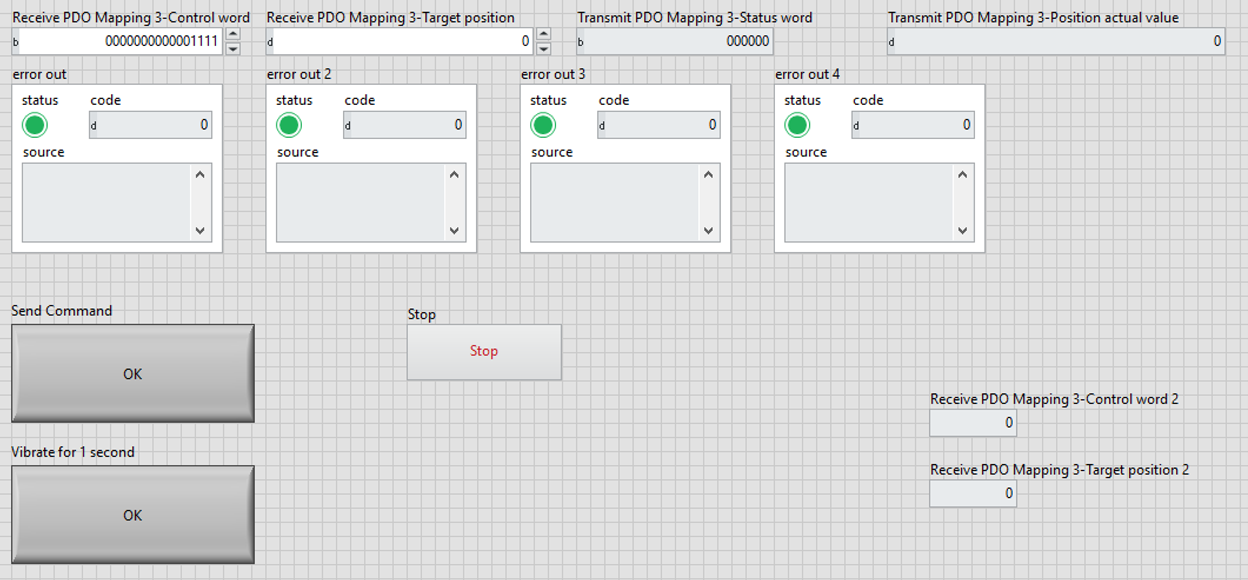
10. 运行你的LabVIEW RT vi,根据驱动的开放IO开发代码。(附代码作为参考)
11、“
Control word”依次发送0110B、0111B、1111b启动驱动器,驱动器面板显示“
Run”;
12.修改“
Target Position”的值。可以发现,在Position模式下,电机轴随着数值的变化而旋转。
13. 参考驱动器厂商的EtherCAT通讯文档,检查“
Status word”IO 返回值的含义,它对应驱动器的当前状态。
14、“
Position Actual Value”来自电机编码器的返回值。当轴的位置发生变化时,会有不同的返回值。