更高的電流
為了提供更高的電流,必須並聯連接兩個NI PXIe-4138 / 9設備,以便每個設備可以將一半的電流提供給負載。在定電流(電流控制)模式下,只需對每個設備進行編程即可提供所需總電流的一半。在定電壓(電壓控制)模式下,必須採取措施以確保兩個設備之間有均分電流。即使將設備配置為提供電流,如果它們達到電壓極限,它們也會進入定電壓模式。有關定電壓模式和定電流模式的更多信息,請參見NI-DCPower幫助文件。
要以定電壓模式並聯連接兩個設備,它們之間必須存在一些正電阻。由於精度不匹配,這樣能限制了從一個設備流向另一個設備的電流量。
例如,假設您的應用要求使用NI PXIe-4139在5 A下提供5 V的電壓。每個NI PXIe-4139設備在5 V電壓下只能連續提供3 A電流,因此必須並聯連接兩個模組以達到所需的5 A電流。目標是使每個電源測量單元(SMU)提供總電流的一半。但是,由於模組工作在電壓控制模式下,因此不一定提供準確的2.5 A電流。如果模組之一的輸出達到3 A限制,它將進入電流控制模式。這會導致系統變得不穩定,並導致不可預測的輸出到待測物(DUT)。通過在兩個模組之間添加電阻來防止達到電流限制,就可以避免這種情況。
假設您決定將每個模組的電流限制為2.5 A±0.2A。這可以使兩個SMU所提供的電流安穩地保持在3 A的限制以下。 NI PXIe-4139的電壓精度規範指出,在上一次自校準的5°C以內的6 V範圍內,輸出電壓在編程值的0.02%+ 300 uV之內。對於5 V的設定點,精度為±(0.02 / 100 * 5V + 300uV)=±1.3mV。最壞的情況是,一個設備為高1.3 mV的電平,而另一個設備為低1.3 mV的電平,導致兩個輸出之間的差值為2.6 mV。為了將從一個設備流向另一個設備(而不是負載)的電流限制為200 mA,兩個輸出之間需要2.6 mV / 200 mA = 13mΩ的電阻。較小的電阻可能會起作用,但是如果設備之間流過的電流過多,則會浪費功率,並可能迫使通道過早地達到compliance。
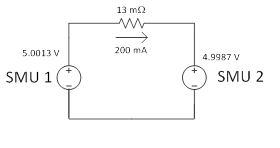
圖1.兩個並聯設備的輸出略有不同,沒有負載連接。 200 mA會從一台設備流向另一台設備。
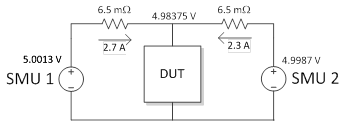
圖2.兩個並聯設備的輸出略有不同,它們在滿載狀態下連接。會有來自一個的2.7 A電流和來自另一個的2.3 A電流。
如果使用local sense,則不需要額外的電阻,因為連接線中至少有6.5mΩ的電阻,因此這兩個設備可以直接並聯連接。但是,在這種情況下,負載電壓會低於所編程的量並且低多少會由負載電流和線路電阻來決定。
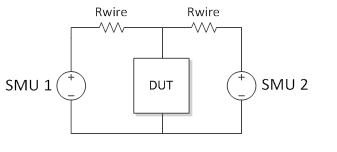
圖3.將兩個並聯設備配置為local sense並顯示導線電阻。
要使用remote sense,您需要在remote sense連接點和DUT之間添加電阻。你可以採用連接的線阻或極低的電阻形式。如果使用NI PXIe-4139,則可以使用其可編程電阻功能將輸出電阻設置為6.5mΩ。 (NI PXIe-4138上沒有可編程的輸出電阻。)
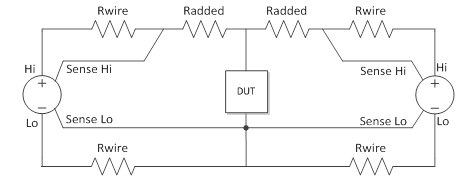
圖4.配置了兩個並聯設備以使用添加的電阻進行remote sense。
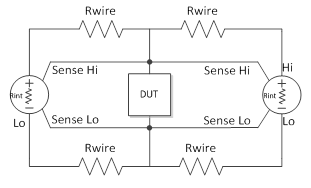
圖5.兩個並行設備配置成以可編程電阻進行remote sense。 (僅限PXIe-4139)
電阻的缺點是負載上的電壓不確實等於編程電壓-因為電阻上會損失一些電壓。在此範例中,滿載電流下的電壓損耗為6.5mΩ* 2.5 A = 16.25 mV。但其實這比local sense連接所經歷的電壓損失還要小。
更高的電壓
為了提供更高的電壓,必須串聯連接兩個NI PXIe-4138 / 9設備,以便每個設備可以將一半的電壓提供給負載。在定電壓(電壓控制)模式下,只需對每個設備進行編程即可提供所需總電壓的一半。在定電流(電流控制)模式下,必須採取措施以確保兩個設備之間能均分電壓。即使將設備配置為提供電壓,如果它們達到電流限制,它們也會進入定電流模式。有關定電壓模式和定電流模式的更多信息,請參見NI-DCPower幫助文件。
要以定電流模式串聯兩個設備,每個設備之間必須存在一些電阻。這能有效限制由於精度不匹配導致的兩個模組之間電壓不匹配的量。
例如,假設您希望以±100 V的電壓限制提供1 mA的電流。每台NI PXIe-4138 / 9設備只能提供60 V,因此必須串聯兩個才能達到所需的100V。目標是使每個SMU提供總電壓的一半。但是,由於模組以電流控制的方式工作,因此它們不一定會平均分配總輸出電壓。如果其中一個模組的輸出達到其60 V的限制,它將進入電壓控制模式。這可能會導致系統不穩定,並給DUT帶來不可預測的輸出。通過在每個模組上增加電阻以防止達到電壓限制,就可以避免這種情況。
假設您決定將每個模組上的電壓限制為50 V±5V。這可以使兩個SMU所提供的電壓安穩地保持在60 V的限制之下。 NI PXIe-4139的電流精度規範指出,在最近一次自校準的5°C以內的1 mA範圍內,輸出電流會在編程值的0.03%+ 60 nA之內。對於1 mA的設定點,精度可達±(0.03 / 100 * 1 mA + 60 nA)=±360 nA。最壞的情況是,一個設備為高360 nA的電平,而另一個設備為低360 nA的電平,兩個輸出之間的差值為720 nA。該電流驅動著兩個SMU之間的共同節點,並且如果您希望將中間節點的電壓誤差限制為5 V,為確保每個設備安穩地保持在其規範的限制內,則需要5 V / 720 nA = 7MΩ的電阻在兩個設備的結點處。你也可以使用更大的電阻,但是兩個設備之間的電壓差太大會迫使通道過早地達到compliance,並在某些情況下會浪費功率。
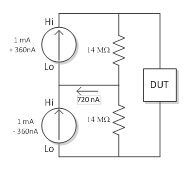
圖6.輸出略有不同的兩個串聯設備通過並聯電阻來連接。
圖6所示的配置使底部SMU不僅向負載提供電流,而且還驅動頂部SMU的common-mode 電容。由於電容緩慢充電,這可能導致建立時間較長。您可以通過反轉底部SMU的連接來解決該問題,如圖7所示。這會需要反轉其已編程好的電流符號。
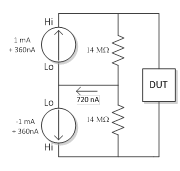
圖7.兩個串聯的器件共享Lo,以減少common-mode電容的負載。
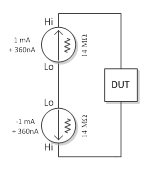
圖8.兩個設備串聯在一起,並具有可編程的並聯電阻。 (僅限NI PXIe-4139)
並聯電阻增加的缺點是,傳遞到負載的電流會略小於編程值,這是因為有些電流流向了電阻。在此範例中,滿載電壓下的電流損耗為50 V / 14MΩ= 3.6 uA。
在某些情況下,您可能需要提供具有unipolar compliance limit的電流。例如,假設您要提供1 mA的電壓,其電壓範圍為0 V至+100V。在這種情況下,您可以使用一個SMU將第二個SMU偏移50V。第一個SMU將設置為50 V在電壓模式下,電流限制會高於所需的1 mA。第二個SMU配置為1mA,並具有超過50 V的限制,以確保它可以從0 V擺動到100V。與第一個SMU的直流偏移就能允許第二個SMU輸出產生-50 V至+50 V的電壓。 DUT兩端的電壓範圍就會為0 V至+100V。這樣就不需要電阻,因為兩個SMU的結點電壓由第一個SMU定義。且因為沒有額外的電阻,所以沒有額外的電流損耗。
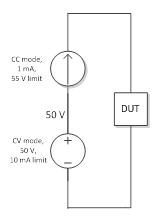
圖9.對於這兩個串聯連接的設備,底部配置為50 V,電流限制為10mA,頂部配置為1 mA,電壓限制為55V。junction 電壓為50V。
在串聯和並聯運行之間選擇
考慮一種情況,您希望在2 A的電流下產生15 V的電壓為設備供電。 30 W的要求超出了單個NI PXIe-4139的20 W連續功率輸出範圍。您可以並聯兩個設備以在15 V電壓下分別提供1 A電流。這將需要上述外部平衡電阻。或者,您可以串聯連接兩個模組,每個模組在2 A時提供7.5 V電壓。該選項不需要任何外部平衡電阻,因此是首選。但是,由於沒有平衡電阻,因此應考慮如果達到電流限制會發生什麼情況。在這種情況下,最好讓頂部模組在底部模組之前達到其電流限制,以防止任一SMU上的common-mode電壓擺動。底部設備可以設置為6 V,電流限制為3 A,而頂部設備可以設置為9 V,電流限制為2A。每個設備的輸出都在20 W功率限制內,但只有頂部設備能夠達到其電流限制。
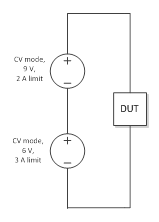
圖10 。這是具有不同電壓電平和電流限制的兩個串聯設備。
同步化
當並聯或串聯連接多個SMU時,重要的是使輸出具有相同或相似的configuration properties。這樣可以保持每個SMU所需的平衡,並防止交叉驅動。在sequence source mode下運行時,同步尤為重要。
要同步兩個SMU,需要將一個SMU定義為主設備,另一個SMU為僕設備。主SMU負責發信號通知僕SMU啟動並前進到下一個sequence step。所有指令均可透過使用NI-DCPower驅動程式獲得的事件和觸發器來完成。
在下一章節中,將學習如何同步多個NI PXIe-4138 / 9輸出,以獲得一系列的設定值和一系列的脈衝。
設定值順序
同步設備的第一步是確保兩個設備的初始狀態相同。它們不僅應進行編程以達到相同的配置,而且還應以相同的狀態啟動。如果一台設備以不同的狀態啟動,則可能會在準備就緒之前就向第二台設備添加額外的延遲或可能的來源。
為了確保兩個設備都處於相同的初始狀態,請添加一個initial sequence step,將電壓和電流都設置為零。然後,為兩個設備使用相同的properties(例如 voltage level/limit, current level/limit, operating range等)對後續步驟進行編程。這樣可以防止一個SMU驅使另一個SMU達到compliance,並使兩個設備保持同步。
在配置完兩個設備之後,請確保僕設備準備好接收觸發,然後主設備才發送一個觸發。為此,請在啟動主設備之前啟動僕設備。按此順序啟動設備可防止丟失觸發器。
當主設備啟動時,它會向僕設備發送Start Trigger,僕設備開始執行其各自的序列。如果將主sequences和僕sequences設定為具有相同的source delays 以及 aperture times,則兩個設備將在幾乎相同的時間完成輸出每個設定值。如果僕設備在主設備之後稍稍結束,則來自主設備的觸發信號可能會在僕設備準備就緒之前就到達,進而導致兩個設備失去同步。為了防止這種情況的發生,請在主設備中添加一個measure complete event delay,這會給僕設備額外的時間,以便在要發送主設備觸發器之前能完成其執行。
下面介紹了一系列設定值的主僕協調。
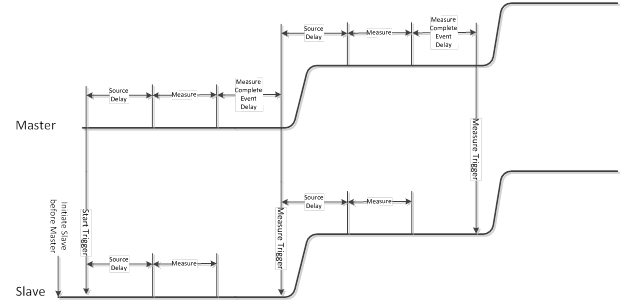
圖11.通過使用“measure complete event delay”使兩個設定點序列同步。
您可以使用NI-DCPower屬性節點添加measure complete event delay。延遲的持續時間取決於您的主僕設置-例如,僕與主設備之間的距離。在內部測試中,1 ms的延遲就已足夠了。為了性能起見,如果對系統進行了適當characterized,則可以大大減少此延遲。
如果您僅是sourcing 而不是 measuring,你就不是添加“measure complete event delay”,而是只需減小僕設備中的“source delay”,以確保僕設備已準備好為主設備使用。一種簡單的方法是將主設備的source delay乘以小於1的係數,並將其結果用作僕設備的source delay。
重要的是要考慮到每個設備都返回自己的測量值。要進行電壓/電流組合測量,您需要在特定應用程式中組合各自設備的測量值。
對於串聯連接的情況,將來自每個設備的電壓測量值相加並取平均值。如果電路中有一個SMU反向,如圖7和8所示,則在將它們與另一個SMU的值組合之前,切記要反向從該SMU返回的值。對於並聯情況,將電流測量結果加總,並對電壓測量結果求平均值。
現在,您已經了解如何分析單個同步sequence step,您可以在以下所有sequence step中重複此模式。
Sequence of Pulses
設置sequence of pulses在概念上類似於設置 sequence of setpoints。在啟動主設備之前,您仍然需要啟動僕設備,以便僕設備準備好接收主設備的Start Trigger。您還需要確保兩個設備的初始狀態和配置相同。您應該在sequence的開頭添加一個步驟,將電壓/電流設置為零。此步驟可確保一個SMU在另一個SMU仍準備就緒時(例如,關閉其輸出繼電器)不會開始sourcing。最後,您需要適當地定時觸發信號的時間,以便僕設備為主設備發送的每個脈衝觸發做好準備。
同步脈衝序列時,將使用不同的事件和觸發器在僕設備和主設備之間發出信號。同樣,關閉時間屬性應用於確定主設備何時將其脈衝觸發信號發送到僕設備。
在圖12中,僕設備甚至在主設備開始啟動之前就準備好從主設備接收 Start Trigger 。然後,兩個設備都會更新其輸出,並在返回到bias levels之前同步進行各自的測量。最終,僕設備的off time會比主設備的off time短,因此它要準備從主設備接收脈衝觸發。
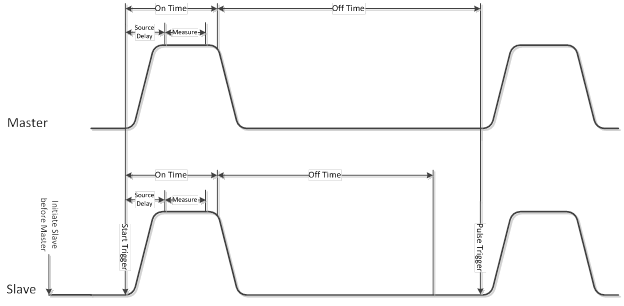
圖12.通過減少僕設備的off time來同步兩個脈衝序列。
確定僕設備要使用多少off time有一種簡單方法是將主設備的off time乘以小於1的係數。該係數會根據主設備的off time值而變化。在內部測試中,該係數0.9就足夠了。一般來說應確保僕設備off time大於僕設備的 pulse bias delay(脈衝返回其bias level之前的延遲)。
只有NI PXIe-4139 SMU能支援超出範圍的脈衝。