Stepping motor changes angle, speed, and direction of rotation depending on the input pulse signal.
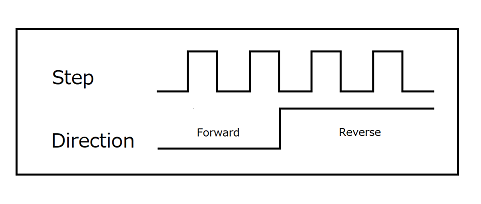
1-Pulse (Step/Dir) Mode
This mode has two inputs for the motor: step and direction (dir) inputs. Step input accepts a pulse signal which determines angle and speed of rotation. Direction input receives either high or low digital signal that regulates direction of rotation.
2-Pulse (CW/CCW) Mode
This mode has CW and CCW inputs. Pulse in these inputs determines whether the motor rotates clockwise or counter clockwise.
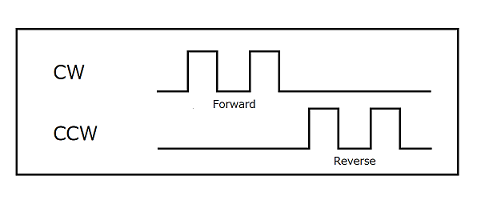
In both modes, number and frequency of input pulse determines the angle and the speed of rotation, respectively.
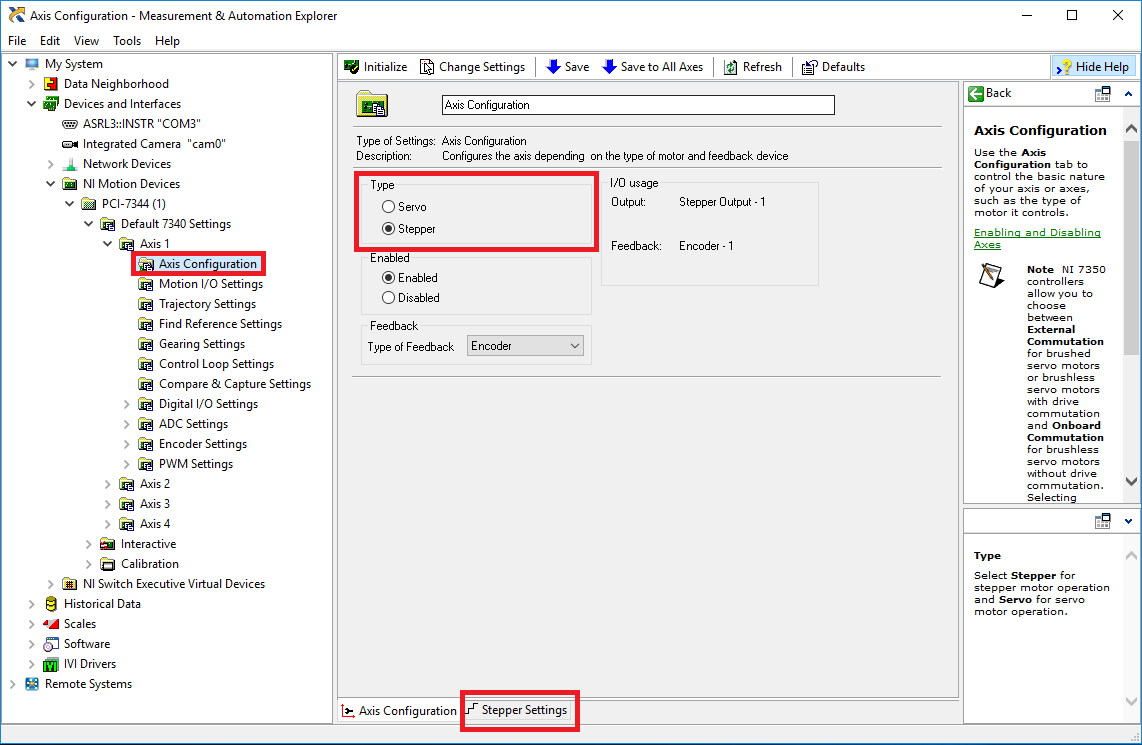
If you are using stepping motor with NI-Motion, you can configure the mode of operation in Measurement and Automation Explorer (MAX).
- Under My System >> Devices and Interfaces >> NI Motion Devices, select the Axis of your NI-Motion board that you are going to use.
- Select Axis Configuration and choose Stepper as a type of motor.
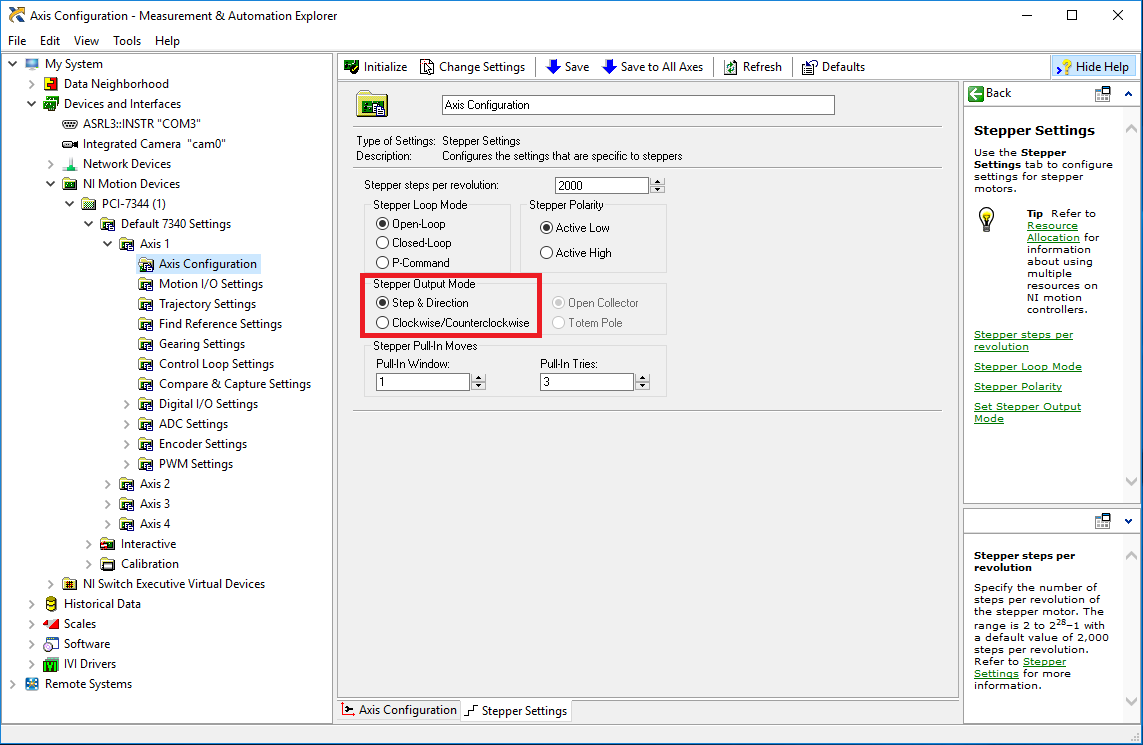
- Select Stepper Setting tab located below.
- Choose the mode of operation required to control your motor under Stepper Output Mode.